















一、影像RTK測(cè)量基本原理和適用場(chǎng)景
影像測(cè)量通常使用相機(jī)等拍攝設(shè)備在兩個(gè)以上不同已知位置拍照或者通過布設(shè)物方像控點(diǎn)后在任意位置拍照構(gòu)成立體像對(duì),通過后處理相片獲取各個(gè)觀測(cè)點(diǎn)的三維坐標(biāo)。將RTK定位技術(shù)與近景攝影測(cè)量技術(shù)融合,結(jié)合RTK實(shí)時(shí)、精度高和近景攝影測(cè)量效率高、測(cè)量成果豐富等優(yōu)點(diǎn),可以在不固定測(cè)站、不設(shè)控制點(diǎn)的情況下,可以有效解決RTK在城市測(cè)量環(huán)境中信號(hào)不佳和攝影測(cè)量依賴于控制點(diǎn)的問題,并對(duì)于傳統(tǒng)的點(diǎn)測(cè)量具有更高的作業(yè)效率(作為信息載體的相片或影像包含被測(cè)目標(biāo)最大的信息、面測(cè)量)、更豐富的測(cè)量成果(各類數(shù)據(jù)、圖形、圖像、數(shù)字表面模型以及三維動(dòng)態(tài)序列影像)。
影像RTK常見的使用場(chǎng)景包括:
? 適合城市測(cè)量環(huán)境衛(wèi)星信號(hào)受到遮擋或者RTK固定效果不佳的建筑死角;
? 非接觸式測(cè)量,適合危險(xiǎn)、圍蔽區(qū)域;
? 建筑物立面測(cè)量,土方測(cè)量等;
? 可以補(bǔ)充地面影像數(shù)據(jù),搭配無人機(jī)空地一體化建模;
二、中海達(dá)影像小碟影像測(cè)量功能使用步驟
中海達(dá)影像小碟,配置雙攝像頭,主機(jī)側(cè)面攝像頭用于影像測(cè)量功能,底部攝像頭用于影像放樣。

中海達(dá)Hi-Survey軟件影像測(cè)量功能入口如圖所示,進(jìn)入影像測(cè)量后可以看到拍照界面,使用主機(jī)的側(cè)面的攝像頭對(duì)準(zhǔn)待測(cè)物體,自行調(diào)整角度。建議以一定弧度的拍攝位置拍攝至少6張且有一定的重合度的照片用于軟件解算。解算完成后,通過軟件光標(biāo)在至少兩張照片上刺中同一個(gè)特征點(diǎn),即可獲取到該測(cè)點(diǎn)的三維坐標(biāo)。
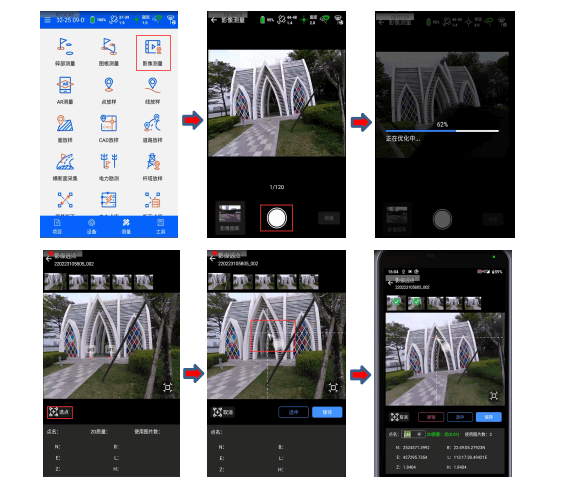
影像小碟高性能圖像處理技術(shù)適配安卓平臺(tái),解算速度極快,6張照片約20秒即可完成解算,圖片中的所有點(diǎn)都可以直接在現(xiàn)場(chǎng)實(shí)時(shí)獲取到坐標(biāo),典型測(cè)量精度2-4cm。
三、常見的操作問題及注意事項(xiàng)?
常見問題:
1、影響測(cè)量拍照后解算失敗,無法進(jìn)行刺點(diǎn)。解算的成功率主要取決于拍照的位置和照片的質(zhì)量,推薦按照以下拍照位置進(jìn)行拍照。
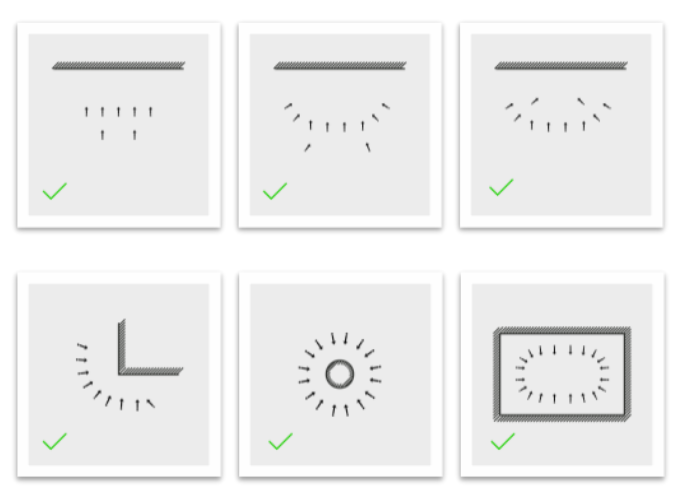
以下為錯(cuò)誤的拍攝位置示意:

2、精度不符合要求,可以檢查刺點(diǎn)位置是否一致以及設(shè)備實(shí)際桿高和設(shè)置高度是否一致。
注意事項(xiàng):
1、使用影像測(cè)量功能時(shí),手簿和主機(jī)之間使用WiFi進(jìn)行通信;
2、使用影像測(cè)量功能時(shí),確保慣導(dǎo)狀態(tài)可用,設(shè)置桿高與儀器的實(shí)際桿高一致;急速旋轉(zhuǎn)、劇烈振動(dòng)等不規(guī)范操作可能會(huì)影響慣導(dǎo)精度;
3、拍攝照片應(yīng)盡量清晰,按推薦拍攝位置進(jìn)行拍攝解算效果最優(yōu),如解算失敗按照推薦的拍攝位置補(bǔ)拍重新解算。
如您還有中海達(dá)rtk技術(shù)方面的疑問可撥打售后服務(wù)熱線:400 678 6690 轉(zhuǎn)2
助力新型基礎(chǔ)測(cè)繪建設(shè)
掌握一手行業(yè)動(dòng)態(tài)
中海達(dá)攜最新技術(shù)成果及行業(yè)解決方案 集中亮相






 頂部
頂部